AFM 的發明
原子力顯微鏡(AFM)是由 IBM 瑞士蘇黎世研究所的科學家 Gerd Binnig 和 Heinrich Rohrer 所發明。
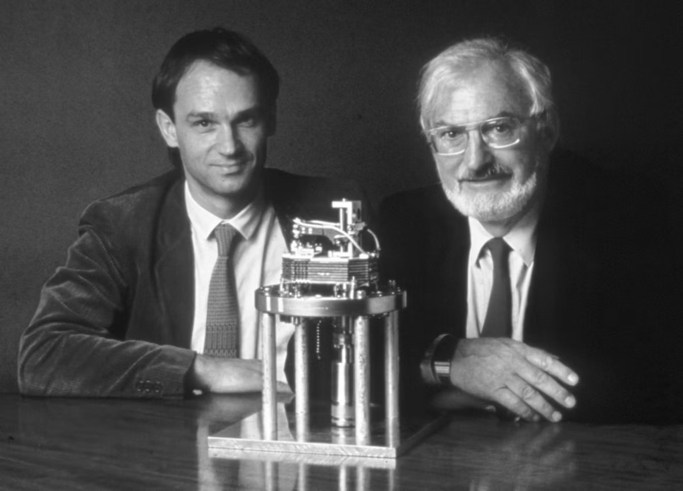
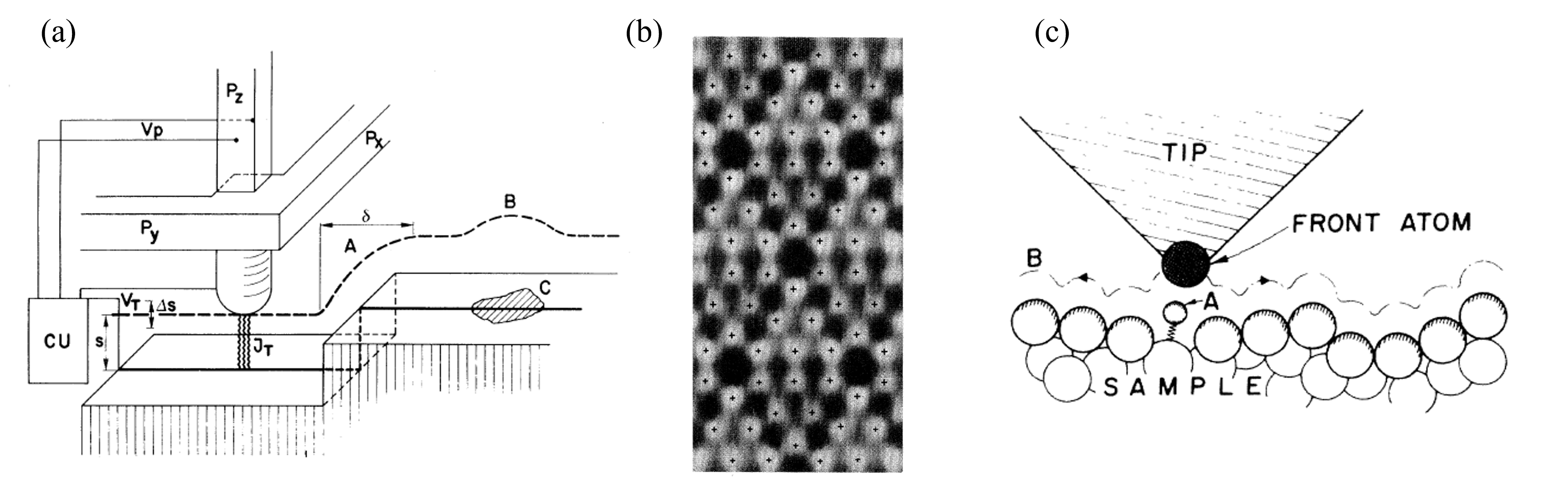
他們早在 1981 年便成功建造了第一台掃描穿隧顯微鏡(STM),開創了利用尖端探針觀察原子級表面結構的新技術;並在 1982 年首次成像 Si(111)-(7×7) 表面的原子排列,證明了 STM 的革命性解析能力。基於這些研究成果,Binnig 與同事於 1985 年進一步開發出原子力顯微鏡,可用於測量原子級別的表面形貌。
在 STM 和 AFM 的基礎上,基於探針和樣品表面的不同相互作用,又誕生了整個掃描探針顯微鏡(Scanning Probe Microscope)體系,包括 SCM、SSRM、KPFM、cAFM 等,使探針顯微技術不再受限於導電材料,而能在絕緣體、聚合物、生物材料等多種樣品上取得奈米尺度的形貌資訊和電學、磁學等資訊,從而大幅拓展了奈米科技與表面科學的研究範圍。
裝置設定
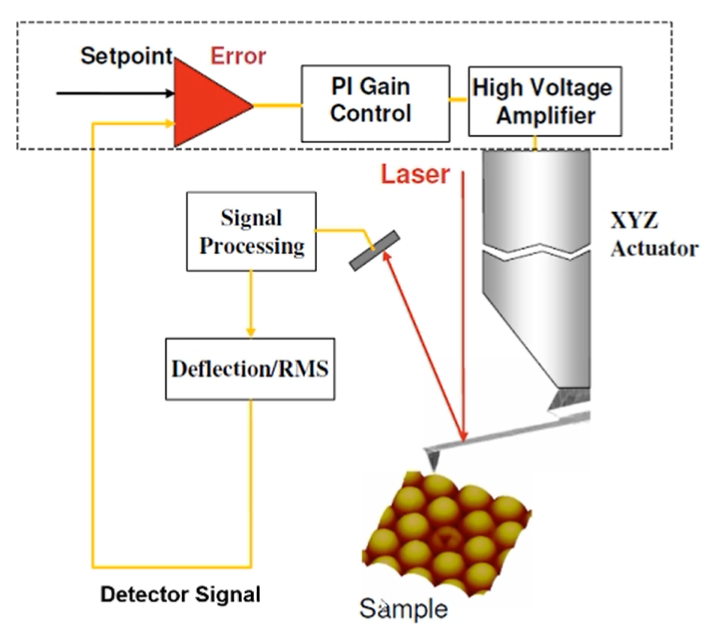
如圖 3 所示,在原子力顯微鏡中,探針與樣品表面相互作用所造成的撓曲量(Deflection)會被光學槓桿偵測系統量測,並轉換成探測器訊號(detector signal)。這個訊號經過訊號處理後,與系統所設定的設定值(setpoint)比較,形成一個誤差信號(error)。
為了維持探針與樣品間的作用力恆定,AFM 會利用 PI 增益控制(PI gain control)來調整誤差,並輸出一個控制訊號到高電壓放大器(high voltage amplifier)。放大後的電壓會驅動 XYZ 執行器(XYZ actuator),以精準移動樣品或探針,使誤差最小化。在掃描過程中,執行器在 XYZ 三軸方向的調整量即可重建樣品表面的高度與形貌,最終形成 AFM 的三維地形影像。
測量模式
接觸模式 Contact Mode
懸臂梁可以認為是一個彈簧,可以拉伸和壓縮,也可以振動。在接觸模式下,AFM 懸臂梁與樣品表面之間的作用力可由虎克定律(Hooke's Law)描述:F = −kx,其中 F 是探針與樣品之間的作用力,k 是懸臂梁的彈簧常數,x 是懸臂梁的撓曲量(位移)。接觸模式 AFM 可在大氣環境與液體環境下操作。
反饋系統原理:
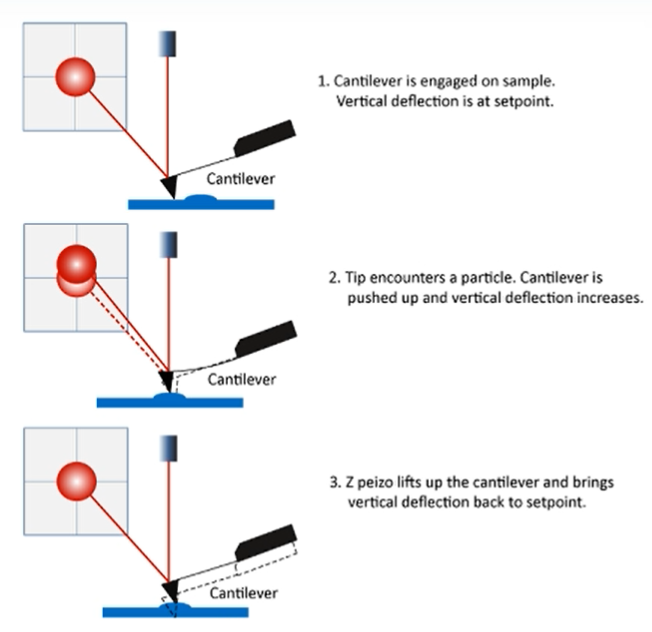
- 接觸(Engagement):懸臂梁被緩慢下降至與樣品表面接觸。系統將懸臂梁的垂直撓曲量設定為一個預先定義的設定值 setpoint。
- 探針遇到表面凸起:當探針掃描到表面凸起、顆粒或其他地形變化時,懸臂梁會被向上推,使撓曲量增加。
- 回授反應(Feedback response):Z 向壓電致動器會調整其位置(通常為上移),以將撓曲量重新拉回設定值。
透過這樣的閉迴路回授系統,AFM 能夠持續維持懸臂梁的撓曲量恆定,也就是保持探針—樣品之間的作用力不變。Z 向壓電致動器在掃描過程中的位移變化,即對應樣品表面的高度資訊,從而重建表面形貌。
敲擊模式 Tapping Mode
在輕敲模式中,可以把懸臂梁當做一個振盪器(oscillator),可以在外部恆定頻率驅動下實現特定頻率的振動。以下是輕敲模式下探針和樣品表面相互作用的過程:
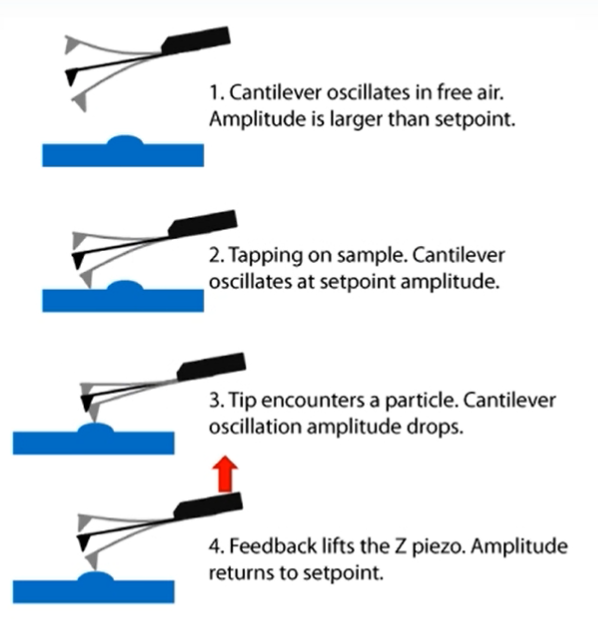
- 自由振盪:懸臂梁在空氣中以一個大於設定值的振幅自由振盪。
- 輕敲樣品:當探針逐漸接近樣品表面時,由於間歇性的探針–樣品相互作用,懸臂梁的振盪振幅會逐漸減小,直到與設定值相符合。
- 探針遇到突起特徵:當探針輕敲到較高的表面結構時,振幅會進一步下降。
- 回授反應:回授控制器會提高 Z 向壓電致動器的位置,使振盪振幅回復到設定值。
透過這套閉迴路回授系統,AFM 能夠維持一個恆定的振盪振幅(Amplitude),確保成像時探針與樣品之間的相互作用穩定且可重複。輕敲模式可在大氣、真空環境與液體環境下操作。
峰值力輕敲 PeakForce Tapping Mode
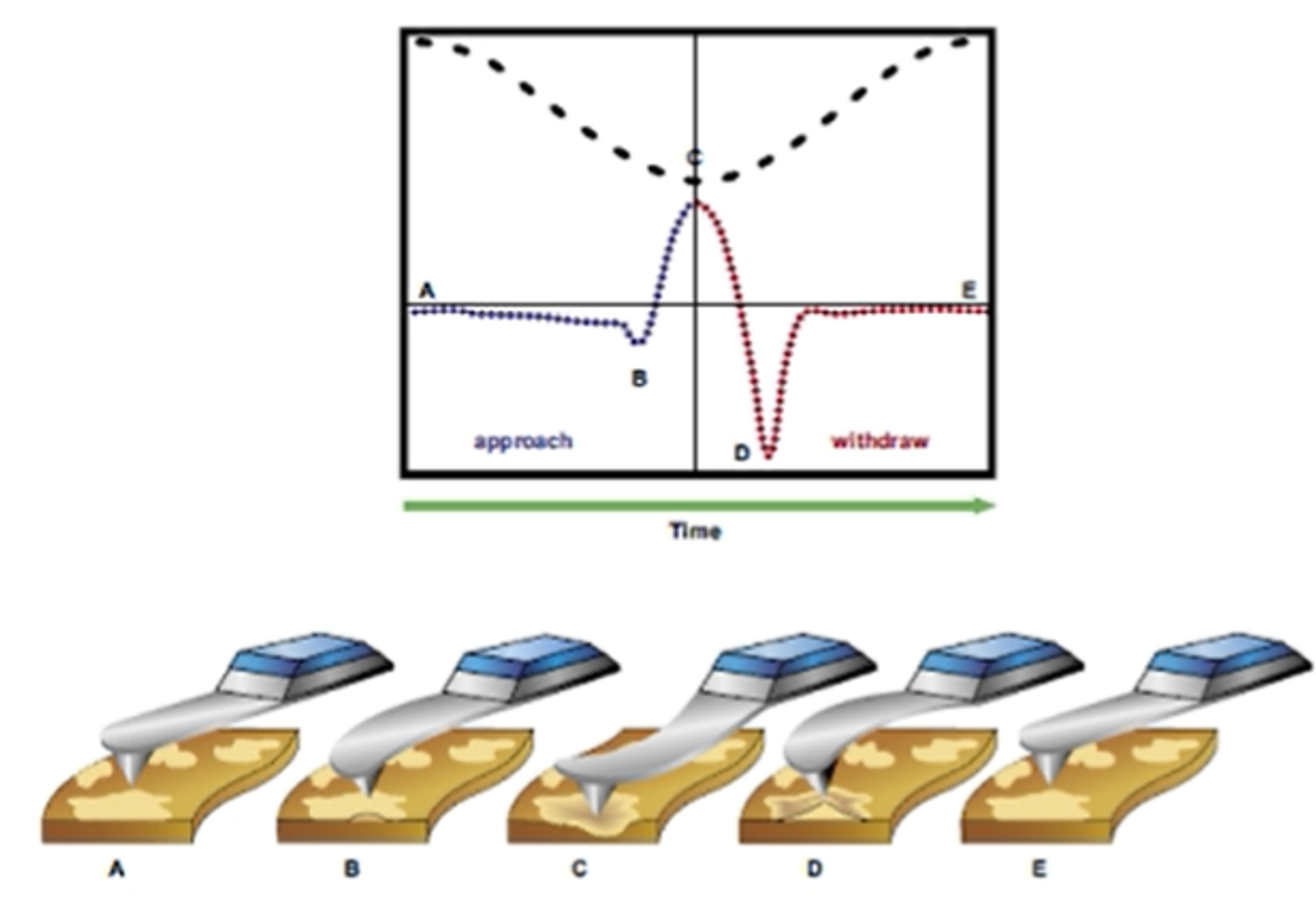
PeakForce Tapping 則是更深入探索探針和樣品表面相互作用曲線的成果。與傳統的輕敲模式不同:輕敲控制的是振盪振幅,而峰值力輕敲控制的是每一次探針—樣品相互作用週期中施加的最大力(Peak Force)。以下是探針每一次從遠處靠近樣品表面並「接觸」,然後逐漸遠離樣品表面的過程:
- A. 探針離樣品很遠,二者之間作用力很小,為吸引力。
- B. 探針逐漸靠近樣品,二者間吸引力逐步增強。
- C. 過了某一臨界點後,吸引力減少,轉變為排斥力,且排斥力逐漸增加到最高點。所謂的「接觸」強弱,就取決於這個最高點的排斥力峰值。
- D. 然後探針逐漸遠離樣品,排斥力逐漸減少,轉為吸引力而且吸引力逐步增大。
- E. 過了某一臨界點後,吸引力又逐步減小至微弱。
在每次輕敲週期中,系統會量測探針與樣品接觸時的瞬時最大作用力。一個高速的閉迴路回授系統會立即調整 Z 壓電致動器的位置,以使峰值力維持在設定值。因此,探針—樣品之間的作用力始終穩定、可控,並且大幅降低對樣品與探針造成損傷的風險。
PeakForce Tapping 模式能夠大幅簡化 AFM 操作,降低學習門檻;提升成像的穩定性與可重複性;並且在每一次輕敲循環中可同步取得材料機械性質(如黏彈性、模量、黏著力等),可進行定量奈米力學映射(Quantitative Nanomechanical Mapping, QNM)。
數據分析
AFM 最常用的功能之一是進行樣品表面形貌(topography)的量測。圖 7 展示了使用 AFM 量測晶圓在 PVD 鍍銅後的表面形貌,可以觀察到明顯的顆粒狀結構。此類形貌可以以二維(2D)或三維(3D)形式呈現。此外,在整個測量區域內還可計算平均粗糙度。
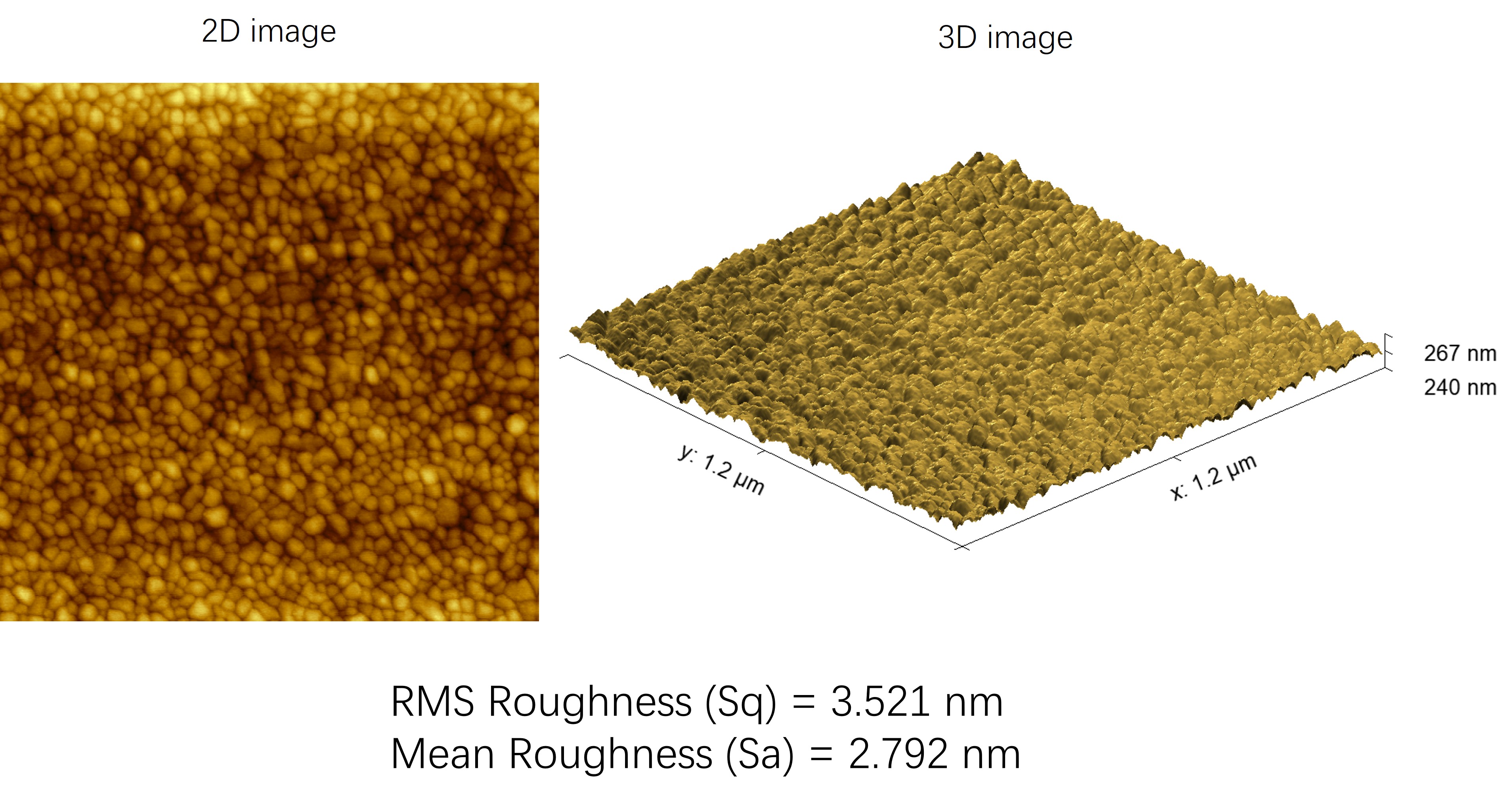
平均粗糙度 Sa = (1/N) Σ|zi − z̅|,均方根粗糙度 Sq = √[(1/N) Σ(zi − z̅)²]。其中 N 為量測點的總數,zi 為第 i 個量測點的高度,z̅ 為平均高度。
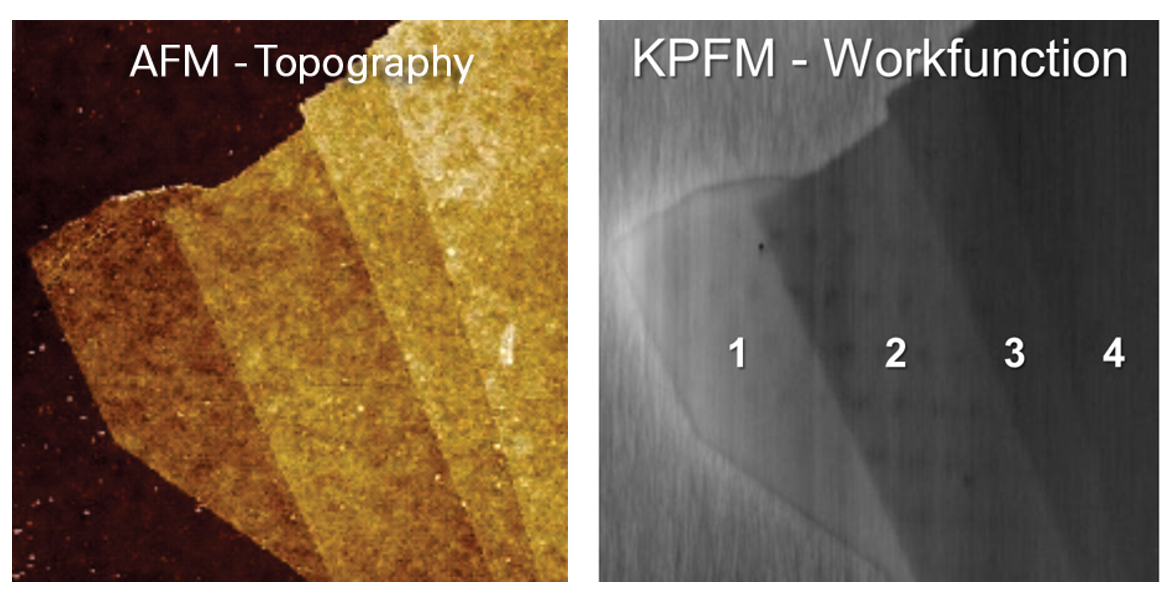
如圖 8 所示,AFM 在二維材料研究中具有獨特的優勢。除了能夠清楚量測並區分不同層數之二維材料的厚度外,還可以結合多種操作模式,分析不同厚度材料的其他物理性質,例如功函數等參數。